Die Stunde hat geschlagen: LEGO Technic Uhr in der Detail-Vorstellung mit einer ausführlichen Beschreibung, Bildern und einem Video.
Für die Zusammengebaut 2018 LEGO-Ausstellung in Borken wollte ich neben meiner Zeichenmaschine noch ein weiteres MOC beisteuern. Da sich auf meinen Ausstellungstischen alles um das Thema LEGO Technic dreht, war die Frage: Was wird über Zahnrädchen und Getriebe gesteuert, war noch nicht allzu häufig als Modell irgendwo vertreten (es sollte also kein Auto, Kran oder ähnliches werden) und lässt sich im Rahmen meiner Fähigkeiten umsetzen? Die Antwort war auch relativ schnell gefunden: eine Uhr! Das mit den Fähigkeiten war damit noch nicht abschließend entschieden, aber die ersten beiden Punkte schienen mir erfüllt. Also ging es ans Werk. Im wahrsten Sinne des Wortes…
Inhaltsverzeichnis
Die Herangehensweise
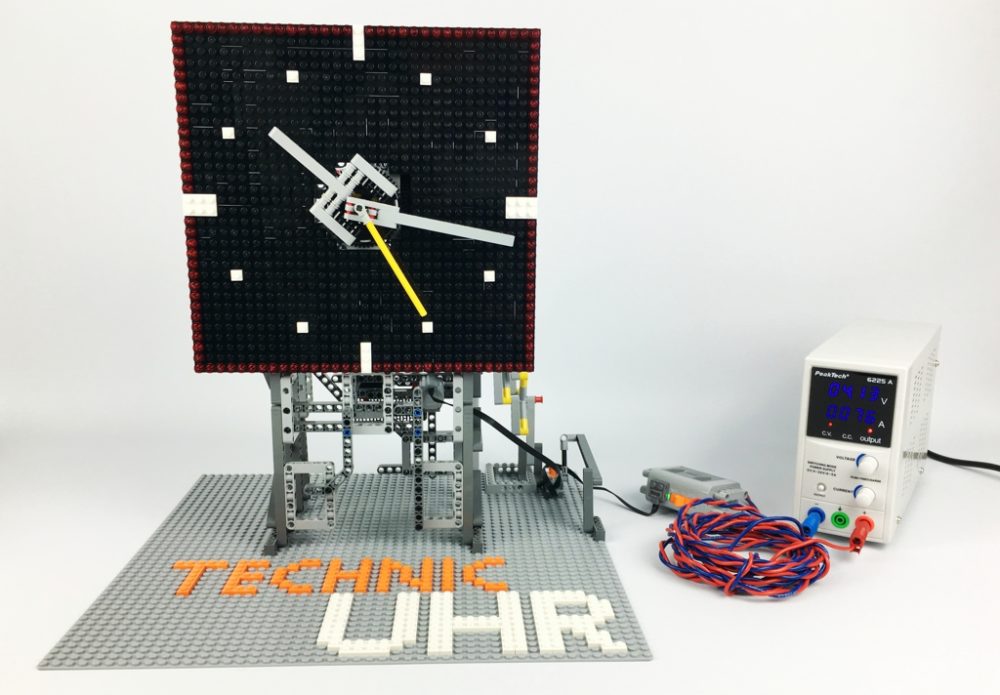
Den Entstehungsprozess, sowie das fertige Modell – wie es tatsächlich Ende November 2018 auch zum Einsatz kam – will ich im Folgenden vorstellen. Zugegeben: eine Schönheit ist sie nicht geworden, aber der Fokus lag ja auch in erster Linie auf der Funktion.
Bevor die ersten Steinchen beziehungsweise Zahnrädchen in die Hand genommen wurden, waren einige Vorüberlegungen notwendig. Grundsätzlich sollte die Uhr Stunden-, Minuten und Sekundenzeiger haben. Und natürlich funktionieren, und zwar möglichst genau. Eine rein mechanische Umsetzung mit Federkraft oder über ein Gewicht wäre spannend gewesen, erschien mir aber zu schwierig – zumindest für das erste Uhrenmodell. Somit war schon mal die Entscheidung getroffen, dass ein Power Functions Motor als Antrieb zum Einsatz kommt.
Ein wichtiger Punkt war noch zu klären: Wie stelle ich die Ganggenauigkeit ein? Oder anders ausgedrückt: Ich muss sicherstellen, dass der Sekundenzeiger möglichst genau eine Minute braucht, um eine Runde über das Ziffernblatt zu drehen. Um Stunden- und Minutenzeiger brauchte ich mir darüber hinaus keine Gedanken machen, da diese über ein Getriebe mit den passenden Untersetzungen direkt vom Sekundenzeiger angetrieben werden. Der Minutenzeiger ist über 60:1 mit dem Sekundenzeiger verbunden, das heißt, wenn letzterer sich 60 Mal im Kreis gedreht hat, vollführt der Minutenzeiger genau eine Runde. Mit dem Stundenzeiger funktioniert das analog, nur dass dieser mit einer Untersetzung von 1:12 am Minutenzeiger hängt. Für beide müssen letztendlich nur die passenden Zahnrädchen miteinander verbunden werden. Und bei der Fülle an möglichen Technic-Zahnrädern, also mit diversen Zahnanzahlen, war ich mir sicher, dass sich eine entsprechende Kombination für die gewünschte Untersetzung finden ließe. Zu Recht, wie sich zeigen wird.
Die Funktionen
Die Nenn-Motordrehzahl (ich habe mich für einen M-Motor entschieden, einfach weil der gerade zur Hand war) lässt sich leicht nachschlagen. Insofern war der erste Gedanke eine Untersetzung so zu bestimmen, dass der Sekundenzeiger direkt und genau vom Motor angetrieben wird. Das Problem hierbei: das Getriebe stellt eine Belastung für den Motor dar, was dazu führt, dass sich seine Drehzahl verringert. Und schon stimmt die berechnete Untersetzung nicht mehr. Gleiches passiert auch, wenn die Spannung sinkt, etwa weil die Batterien schwächer werden.
Beides war mir dann zu ungenau, so dass ich mich dafür entschieden habe, den Motor über ein Labornetzteil zu betreiben, an dem ich die Spannung – und damit die Motordrehzahl – sehr genau einstellen beziehungsweise nachjustieren kann. Das ergibt eine höchst mögliche Ganggenauigkeit, und die Drehzahl bleibt konstant, da keine schwächer werdenden Batterien zum Einsatz kommen. Nun bietet LEGO natürlich keine Labornetzteile an. Dafür aber eine Fernsteuerung über die sich ebenfalls die Motordrehzahl einstellen lässt. Vom Prinzip also gleich, nur nicht ganz so genau. Daher war die Nutzung dieses „Fremdbauteils“ für mich akzeptabel.
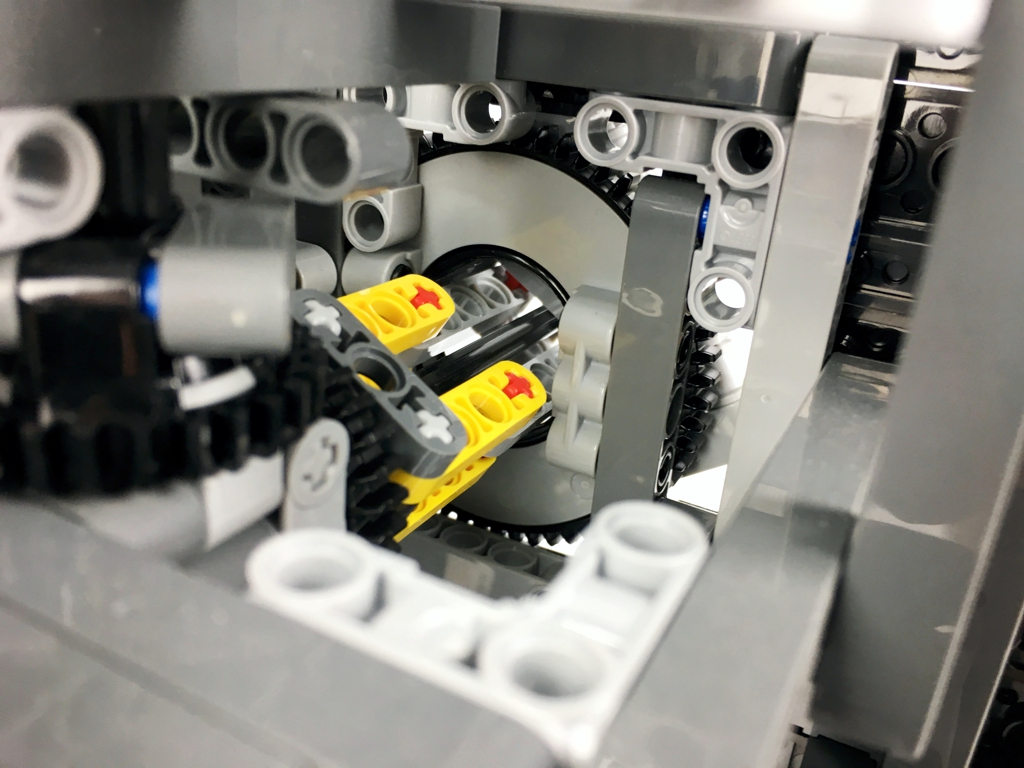
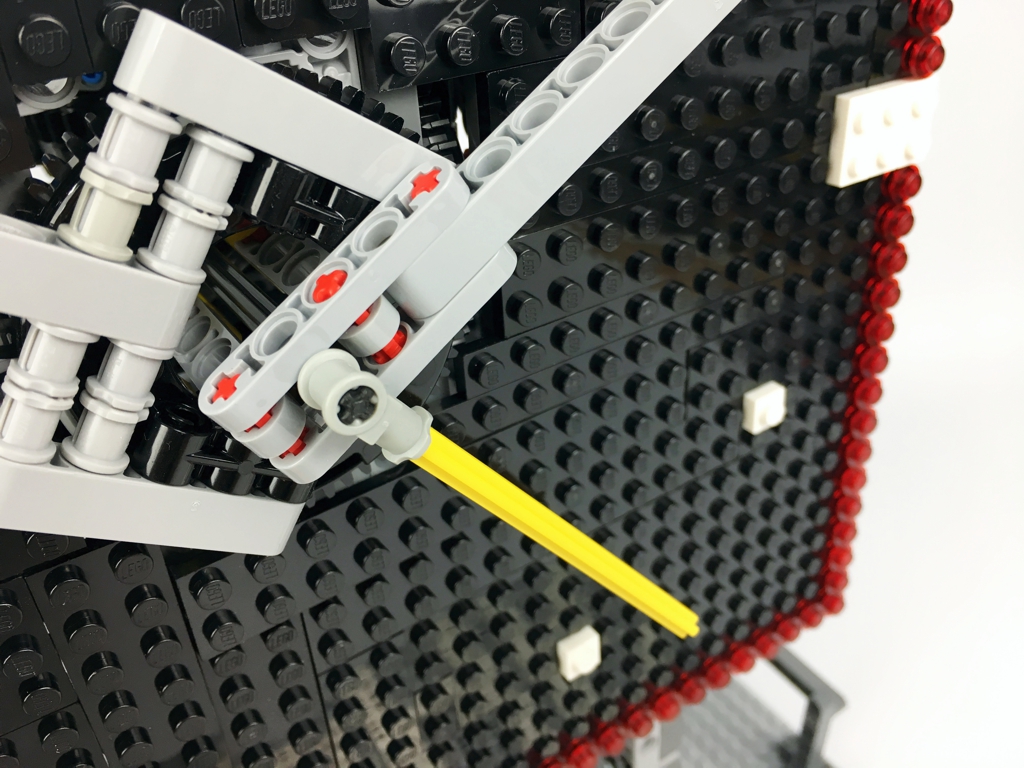
Für das nächste Problem ging es endlich an die Steine! Wie kann ich drei Achsen – eine für jeden Zeiger – antreiben, die alle durch das gleiche Loch, nämlich die Mitte des Ziffernblattes, durchgeführt werden müssen? Zum Glück befanden sich in meinem Teilefundus auch die drehbaren Zahnkränze in klein und groß. Die Umsetzung war nicht einfach, aber letztendlich hat es so funktioniert.
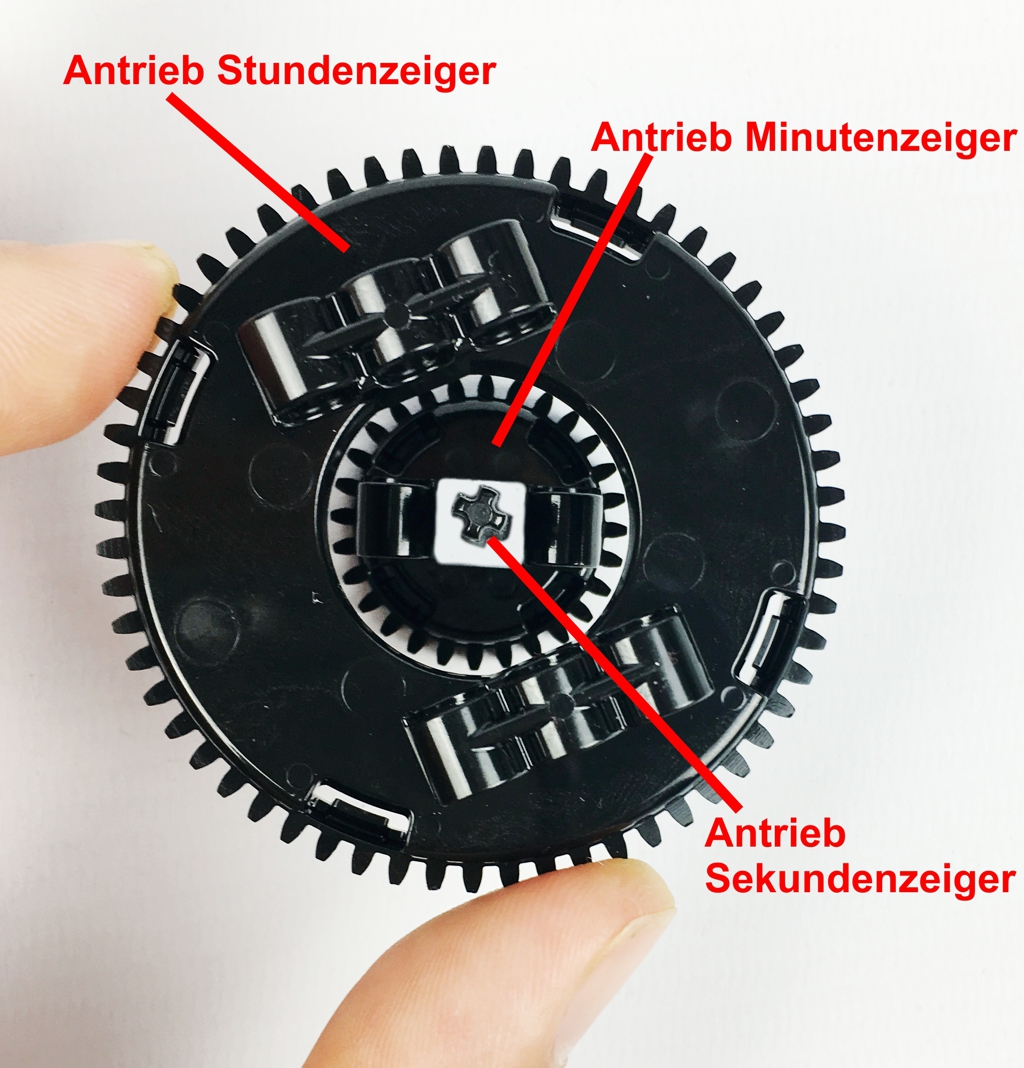
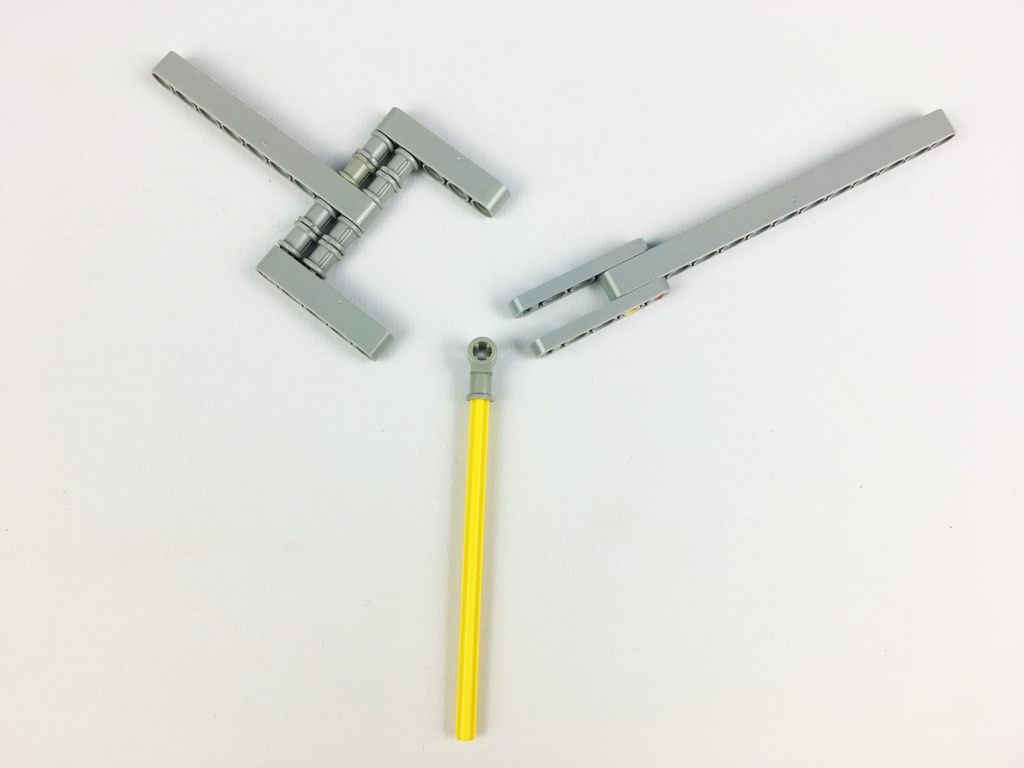
Der große Zahnkranz bildet das stabile Zentrum. An diesem ist der Stundenzeiger befestigt. Am kleinen Zahnkranz befestigte Balken passen durch die Öffnung des Großen. Es ist zwar eng, aber nach einigen Versuchen konnte hierüber der Minutenzeiger bewegt werden. Durch die Öffnung von beiden passt dann noch eine Technic-Achse, die den Sekundenzeiger antreibt.
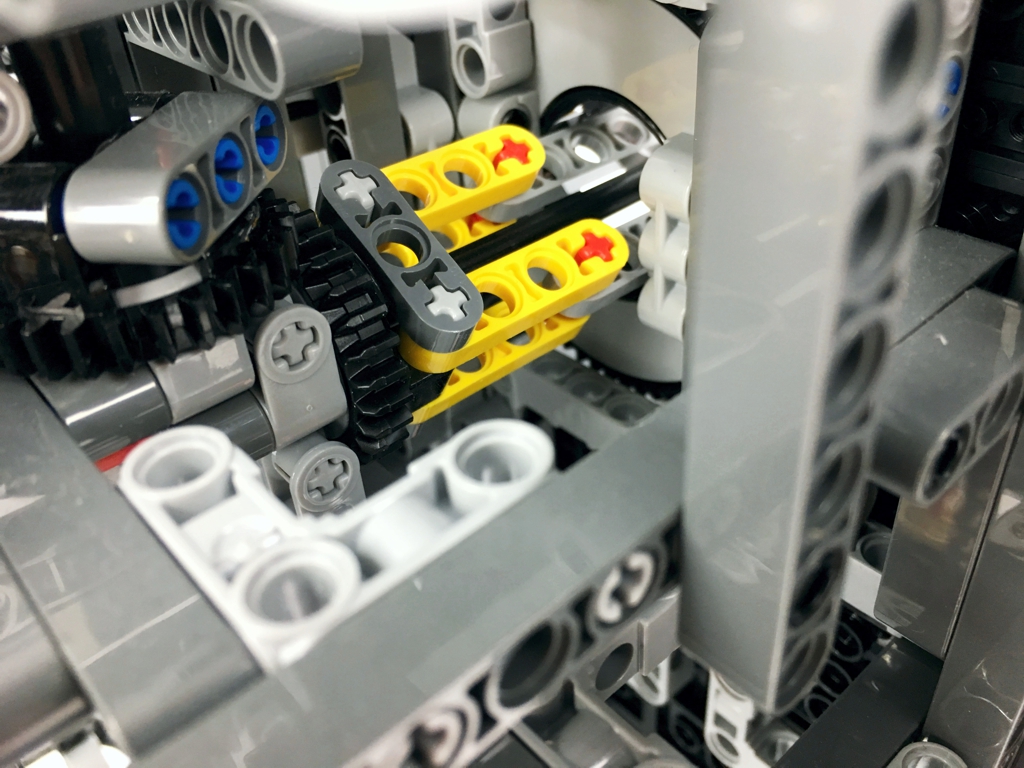

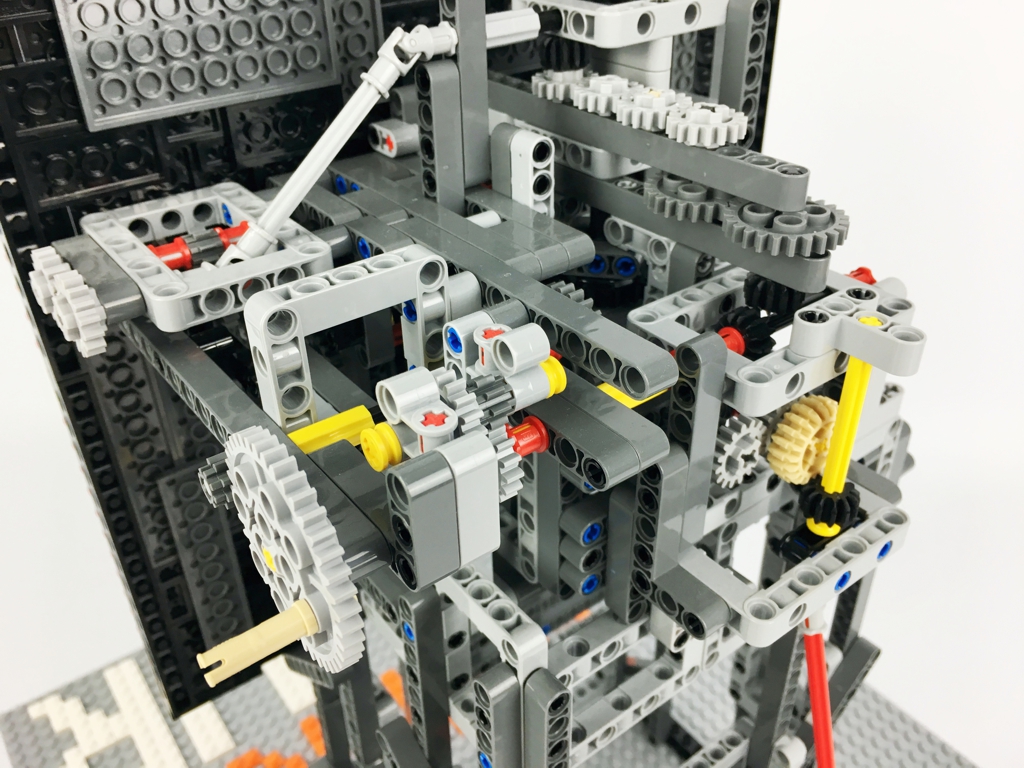
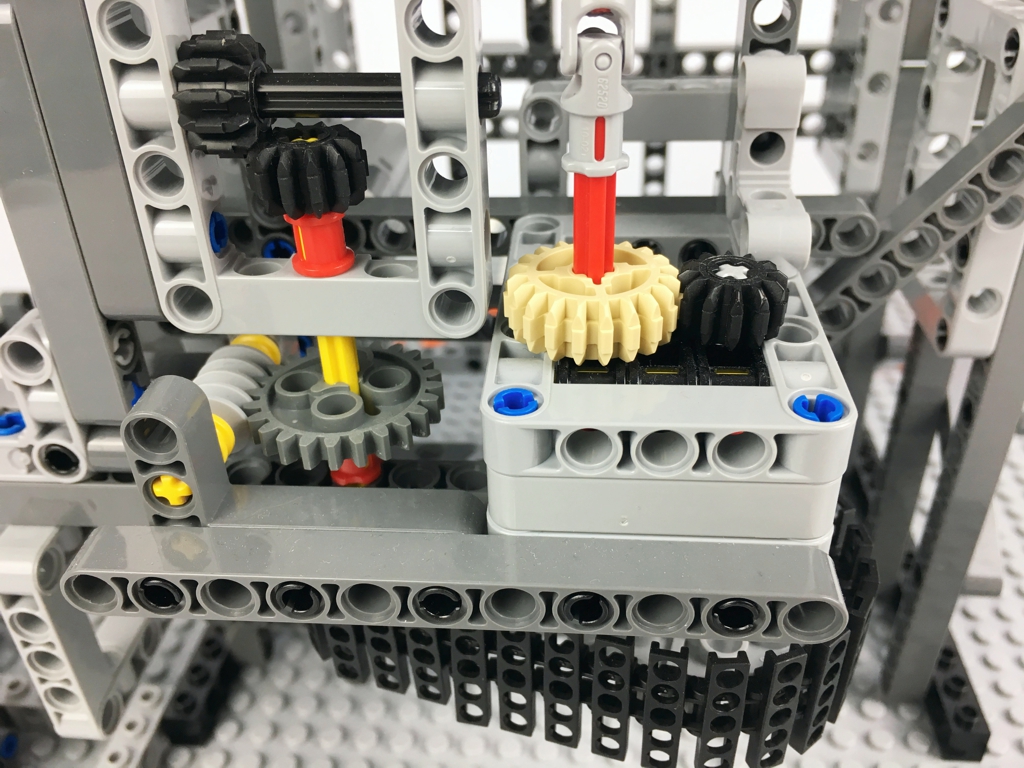
Der schwierigste Teil der Konstruktion war damit geschafft. Jetzt galt es, die Zeiger noch mittels Getriebe und den oben beschriebenen Untersetzungen miteinander zu verbinden und dem Ganzen einen stabilen Rahmen zu geben. Vom Sekundenzeiger zum Minutenzeiger erfolgt der Antrieb folgendermaßen: Ein kleines Z8 Zahnrädchen bewegt ein Z24 (Untersetzung von 3:1). Daran hängt wiederum ein Z8, welches ein Z40 bewegt (5:1). Dann noch zweimal über Z8 / Z16 (das heißt zwei Mal 2:1). Zusammengerechnet ergibt dies genau die gewünschte Untersetzung von 60:1.
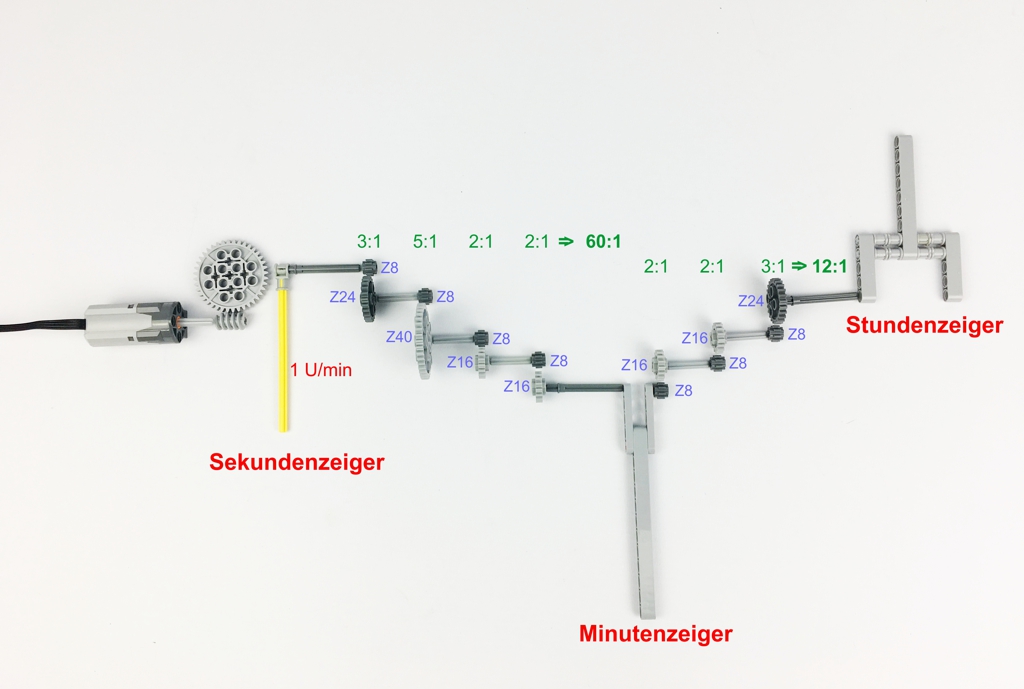
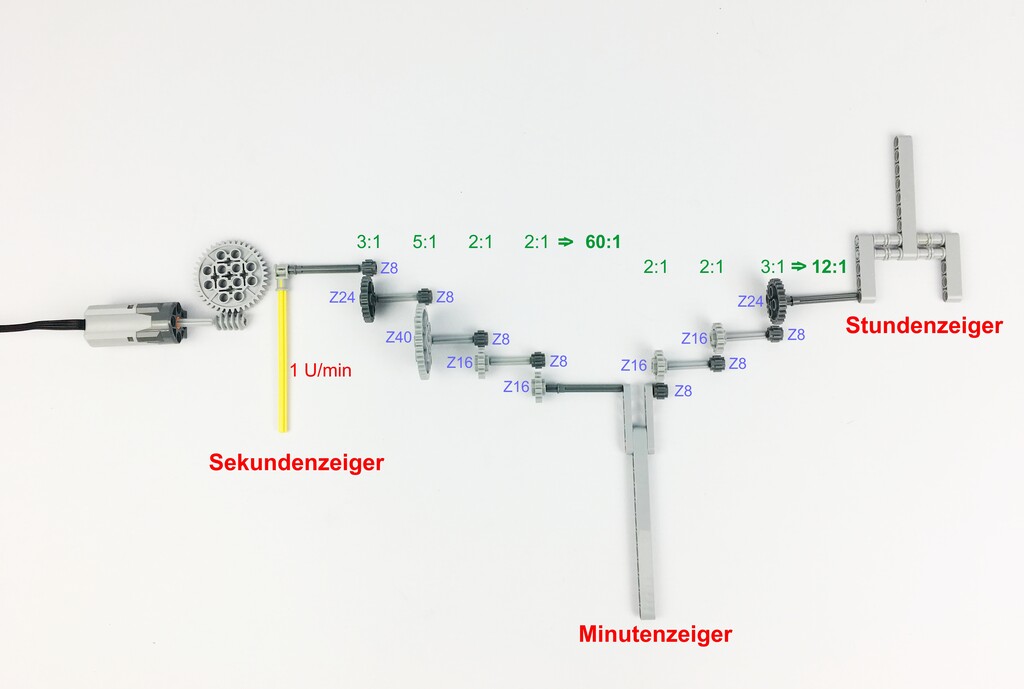
Vom Minutenzeiger zum Stundenzeiger analog mit Z8/Z16 (2:1), Z8/Z16 (2:1) und Z8/Z24 (3:1), ergibt insgesamt 12:1. Alles in allem wären somit vom Sekundenzeiger gesehen vierzehn Zahnrädchen notwendig. Die darüber hinaus verwendeten dienen zum einen der groben Ausgangsuntersetzung vom Motor zum Sekundenzeiger, sowie als reine Laufräder um die entsprechenden Getriebeteile miteinander zu verbinden.
Der ein oder andere Rückbau erfolgte, sei es weil die Konstruktion nicht stabil genug war, oder weil sich Zahnräder in der vorhandenen Rahmenkonstruktion nicht miteinander verbinden ließen. Letztendlich war es aber nur noch eine Fleißaufgabe.
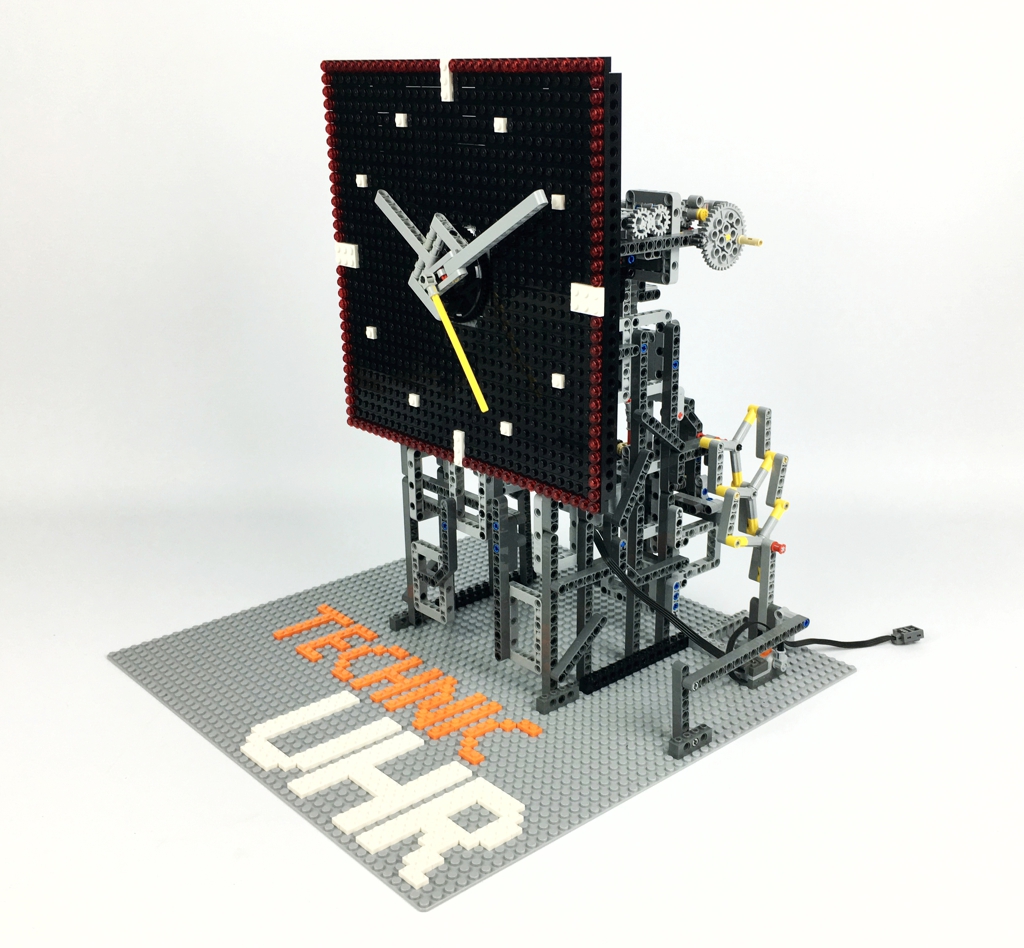
Das Ziffernblatt
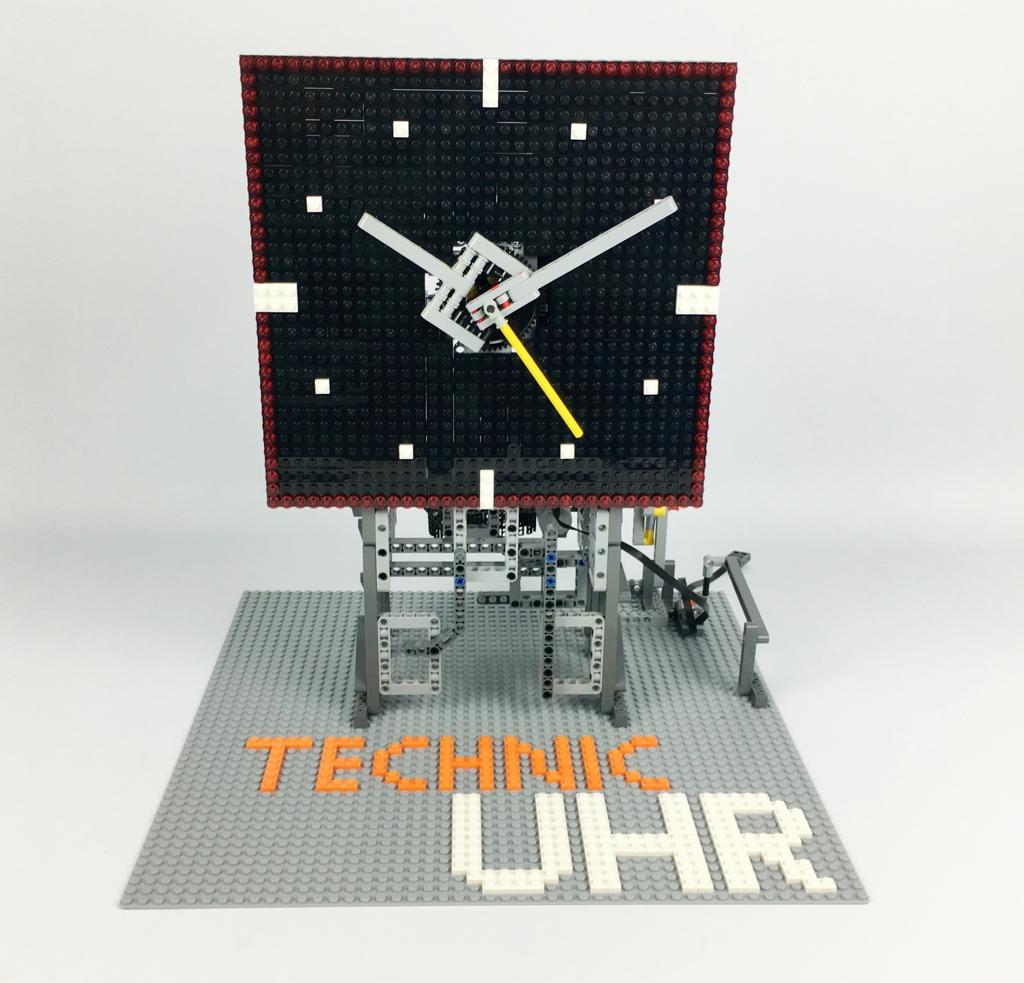
Im letzten Schritt habe ich ein Ziffernblatt an dem Rahmen angebaut, damit man die Uhr auch sofort als Uhr erkennt. Wie schon erwähnt, ist die Optik verbesserungsfähig, aber sie erfüllt ihren Zweck.

Der Anschluss an den Motor erfolgte mit der schon erwähnten nur sehr grob eingestellten Untersetzung, um den Sekundenzeiger in den richtigen Drehgeschwindigkeitsbereich zu bringen. Die Feineinstellung erfolgt ja letztendlich über die eingestellte Spannung. Das ein oder andere Gimmick rein – für optische Effekte (es dreht sich!) – habe ich mir dann nicht verkneifen können.

Das Video
Die Inbetriebnahme
Zur Inbetriebnahme ließ ich den Motor laufen und stoppte die Zeit, die der Sekundenzeiger für einen gewissen Abschnitt über das Ziffernblatt benötigte. War er zu langsam, habe ich die Spannung etwas erhöht und umgekehrt. Nach einigen Minuten war eine passende Einstellung gefunden.
Auf Grund der Toleranzen von Zahnrädern und weiteren verbauten Teilen, sind die Zeiger etwas wackelig unterwegs. Das heißt, sie kippen, nach dem sie die „12“ überschritten haben, leicht nach vorne, und müssen, wenn es nach der „6“ wieder bergauf geht, etwas warten, bis die Zähne wieder greifen. Für die Anzeige der Uhrzeit fällt dies aber kaum auf. Auf der Zusammengebaut 2018 lief die Uhr etwa acht Stunden am Stück, und zeigte immer noch keine Abweichung zur realen Uhrzeit an. Das Ergebnis kann sich also durchaus sehen lassen. Mal schauen, ob ich mich jetzt nicht doch mal an eine rein mechanisch angetriebene Version heranwage…
Wie gefällt euch meine LEGO Technic Uhr? Habt ihr schon Mal etwas Ähnliches mit Technic-Steinen gebaut? Lasst es uns in den Kommentaren wissen.
18. Juli 2019 um 14:38
Cool!!!! Genial 🙂
18. Juli 2019 um 14:46
Ist echt gut geworden und auch eine sehr schöne, detaillierte Beschreibung des Bauprozesses. Vielen Dank dafür!
18. Juli 2019 um 15:23
Wunderbares MOC, André!
Einer der Besten MOC’s ich gesehen habe –
ob nicht das absolut Beste MOC bisher.
Ich liebe MOC’s die sich Bewegen sowie ein Uhr, Autos (RC = Power Functions), Analoger Machinen (RC = Power Functions) und Analoger Roboter (RC = Power Functions).
Grüsse aus Schweden
18. Juli 2019 um 19:39
Hallo André,
großartiger Artikel und spektakuläres MOC! Ich muss es dieses Jahr endlich mal zur „Zusammengebaut“ schaffen, immerhin ist Köln-Borken offenbar eine der wenigen Strecken, auf denen Regionalexpress mit zwei Zugwechseln (in Siegen und in Gießen – in beiden Städten war ich noch nie) ungefähr so schnell ist, wie einen Teil der Strecke im ICE zurückzulegen. Auch das Video kann meiner Meinung nach eine reale Inaugenscheinnahme nicht ersetzen. Ich hoffe, Du wirst die Uhr erneut präsentieren!
18. Juli 2019 um 22:46
Na, das wird aber auch Zeit dass wir dich in Borken mal treffen und dann ein Gesicht zum Namen bekommen können 🙂
Und ja, die Uhr werde ich wieder mitbringen 😉
10. Oktober 2022 um 23:36
Guten Tag! Gibt es ein Paket mit Bestandteile und Anleitung dieser Uhr zu kaufen?
Mit freundlichen Grüßen
Elke Piger